Google Codelab에서 tensorflow 3,4를 같이 분석해보는 시간을 가졌다.
Learn Tensorflow 3: Introduction to Convolutions
<Learn Tensorflow 3: Introduction to Convolutions>
.
tensorflow 3은 tensorflow 2의 연장선인데 tensorflow 2에서 아이템이 이미지의 중앙에 있는 28*28의 회색조 이미지만 처리할 수 있었다. 하지만 tensorflow 3에서는 조금 더 일반적인 이미지를 처리하기 위해서 convolution을 사용한다.
convolution은 이미지를 통과하고 처리하며 이미지에서 공통성을 나타내는 기능을 추출하는 필터입니다. 주어진 필터에 가중치들이 정해져있고 각 픽셀값에 필터의 가중치를 곱하여 더해서 새 픽셀 값을 계산할 수 있다.
filter = [ [-1, -2, -1], [0, 0, 0], [1, 2, 1]]
코드랩에서는 위 필터를 사용했다. training image로 세로선이 많은 계단 사진을 사용했기 때문에 직선을 추출해내기 위해서이다.
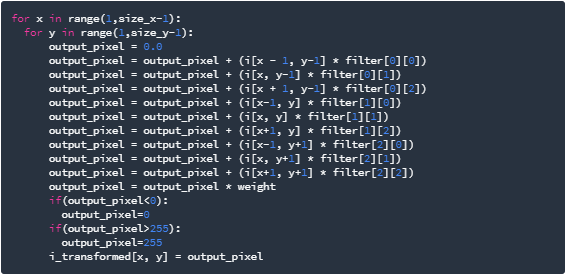
위의 코드를 실행하면 이미지를 반복하면서 가장자리에 1 픽셀의 여백을 남겨두고 현재 픽셀의 각 인접 항목에 필터에 정의된 값을 곱한다. 결과에 가중치를 곱한 다음 결과가 0-255 범위에 있는지 확인한다. 마지막으로 변환된 이미지에 새로운 값을 로드한다. 이 과정은 필터에 따라 다르게 관찰될 수 있다.
filter = [-1,0,1,-2,0,2,-1,0,1] 를 사용하면 기본 이미지에서 매우 강력한 수직선들을 추출해낼 수 있다.
filter = [-1,-2,-1,0,0,0,1,2,1] 를 사용하면 기본 이미지에서 수평선을 추출해낼 수 있다.
풀링은 convolution을 사용할 뿐만 아니라 fiture 감지에 큰 도움이 된다. 풀링은 여러 가지 유형이 있지만 이번 실습에서는 MAX 풀링을 사용한다. 이 방법은 인접한 4개의 픽셀 중 MAX값을 대표값으로 하여, 새로운 이미지를 기존 이미지의 1/4크기로 얻는 것이다.
<colaboratory>
https://drive.google.com/open?id=1ih2YoYRr6DfkkZQqbiTa2DV5r2AIzK3B
.
Learn Tensorflow 4: Convolutional Neural Networks (CNNs)
<Learn Tensorflow 4: Introduction to Convolutions>
https://codelabs.developers.google.com/codelabs/tensorflow-lab4-cnns/index.html?index=..%2F..index#7
.
tensorflow 2의 코드를 다시 실행하고 정확도를 확인해본다. 그리고 나서 convolutional 레이어를 추가한 뒤 실행시켰을 때 데이터의 정확도가 높아진 것을 확인할 수 있다.
하지만 너무 많은 에포크 만큼 실행을 하면 overfitting 현상으로 인해 유효성 검사 결과가 저하될 수도 있다. 네트워크가 훈련 세트에서 데이터를 너무 잘 배울 때 '과잉 적합'이 발생하여 해당 데이터만 인식하는 것에 특이적이 되어 일반적인 상황에서 다른 데이터를 보는 데 덜 효과적이게 된다.
------------------------------------------------------------------------------------------------------------------------------------
추가적으로 openCV로 구현한 간단한 예제도 살펴보았다.
https://www.youtube.com/watch?v=zVuPIBW4Ri8&list=PLwfJJiO20qkDue05S5MNhgYNnClMVlagN&index=6
'''
2019.11.16
'''
import cv2 as cv
import numpy as np
hsv = 0
lower_blue1 = 0
upper_blue1 = 0
lower_blue2 = 0
upper_blue2 = 0
lower_bluethreshold = 0
upper_bluethreshold = 0
def nothing(x):
pass
def mouse_callback(event, x, y, flags, param):
global hsv, lower_blue1, upper_blue1, lower_blue2, upper_blue2, lower_bluethreshold, upper_bluethreshold, threshold
# 마우스 왼쪽 버튼 누를시 위치에 있는 픽셀값을 읽어와서 HSV로 변환합니다.
if event == cv.EVENT_LBUTTONDOWN:
print(img_color[y, x])
color = img_color[y, x]
one_pixel = np.uint8([[color]])
hsv = cv.cvtColor(one_pixel, cv.COLOR_BGR2HSV)
hsv = hsv[0][0]
threshold = cv.getTrackbarPos('threshold', 'img_result')
# HSV 색공간에서 마우스 클릭으로 얻은 픽셀값과 유사한 필셀값의 범위를 정합니다.
if hsv[0] < 10:
print("case1")
lower_blue1 = np.array([hsv[0] - 10 + 180, threshold, threshold])
upper_blue1 = np.array([180, 255, 255])
lower_blue2 = np.array([0, threshold, threshold])
upper_blue2 = np.array([hsv[0], 255, 255])
lower_bluethreshold = np.array([hsv[0], threshold, threshold])
upper_bluethreshold = np.array([hsv[0] + 10, 255, 255])
# print(i-10+180, 180, 0, i)
# print(i, i+10)
elif hsv[0] > 170:
print("case2")
lower_blue1 = np.array([hsv[0], threshold, threshold])
upper_blue1 = np.array([180, 255, 255])
lower_blue2 = np.array([0, threshold, threshold])
upper_blue2 = np.array([hsv[0] + 10 - 180, 255, 255])
lower_bluethreshold = np.array([hsv[0] - 10, threshold, threshold])
upper_bluethreshold = np.array([hsv[0], 255, 255])
# print(i, 180, 0, i+10-180)
# print(i-10, i)
else:
print("casethreshold")
lower_blue1 = np.array([hsv[0], threshold, threshold])
upper_blue1 = np.array([hsv[0] + 20, 255, 255])
lower_blue2 = np.array([hsv[0] - 20, threshold, threshold])
upper_blue2 = np.array([hsv[0], 255, 255])
lower_bluethreshold = np.array([hsv[0] - 10, threshold, threshold])
upper_bluethreshold = np.array([hsv[0], 255, 255])
# print(i, i+10)
# print(i-10, i)
print(hsv[0])
print("@1", lower_blue1, "~", upper_blue1)
print("@2", lower_blue2, "~", upper_blue2)
print("@threshold", lower_bluethreshold, "~", upper_bluethreshold)
cv.namedWindow('img_color')
cv.setMouseCallback('img_color', mouse_callback)
cv.namedWindow('img_result')
cv.createTrackbar('threshold', 'img_result', 0, 255, nothing)
cv.setTrackbarPos('threshold', 'img_result', 60)
cap = cv.VideoCapture(0)
while (True):
# img_color = cv.imread('2.jpg')
ret, img_color = cap.read()
height, width = img_color.shape[:2]
img_color = cv.resize(img_color, (width, height), interpolation=cv.INTER_AREA)
# 원본 영상을 HSV 영상으로 변환합니다.
img_hsv = cv.cvtColor(img_color, cv.COLOR_BGR2HSV)
# 범위 값으로 HSV 이미지에서 마스크를 생성합니다.
img_mask1 = cv.inRange(img_hsv, lower_blue1, upper_blue1)
img_mask2 = cv.inRange(img_hsv, lower_blue2, upper_blue2)
img_maskthreshold = cv.inRange(img_hsv, lower_bluethreshold, upper_bluethreshold)
img_mask = img_mask1 | img_mask2 | img_maskthreshold
kernel = np.ones((11, 11), np.uint8)
img_mask = cv.morphologyEx(img_mask, cv.MORPH_OPEN, kernel)
img_mask = cv.morphologyEx(img_mask, cv.MORPH_CLOSE, kernel)
# 마스크 이미지로 원본 이미지에서 범위값에 해당되는 영상 부분을 획득합니다.
img_result = cv.bitwise_and(img_color, img_color, mask=img_mask)
cv.imshow('img_color', img_color)
cv.imshow('img_mask', img_mask)
cv.imshow('img_result', img_result)
# ESC 키누르면 종료
if cv.waitKey(1) & 0xFF == 27:
break
cv.destroyAllWindows()
'Team Project > 핸들랭(handlang)' 카테고리의 다른 글
| 19/12/28 ~ 20/1/4 회의록, 일지 (0) | 2020.01.11 |
|---|---|
| Welcome to Codelabs!(Tensorflow codelab 5, 6 따라해보기) (0) | 2019.11.25 |
| 프로젝트 관련 강의 수강 [모두의 딥러닝] (0) | 2019.11.11 |
| 유사한 프로젝트 리뷰 (0) | 2019.11.04 |
| 프로젝트 관련 논문 리뷰2 (0) | 2019.10.28 |



댓글